An ROV hook is an industrial fastening commonly used for mooring or lifting, particularly in the Offshore Energy sector for operation and maintenance (O&M) at offshore rigs and platforms. These operations typically cover maintenance of communication cables, pipelines and various subsea construction and salvage activity.
ROV hooks allow for safe, accurate deployment and recovery of equipment in extreme conditions and unpredictable currents. As offshore industries increasingly seek diverless and remote O&M solutions, advanced ROV tooling has become vital in wielding the bulky equipment associated with these complex tasks.
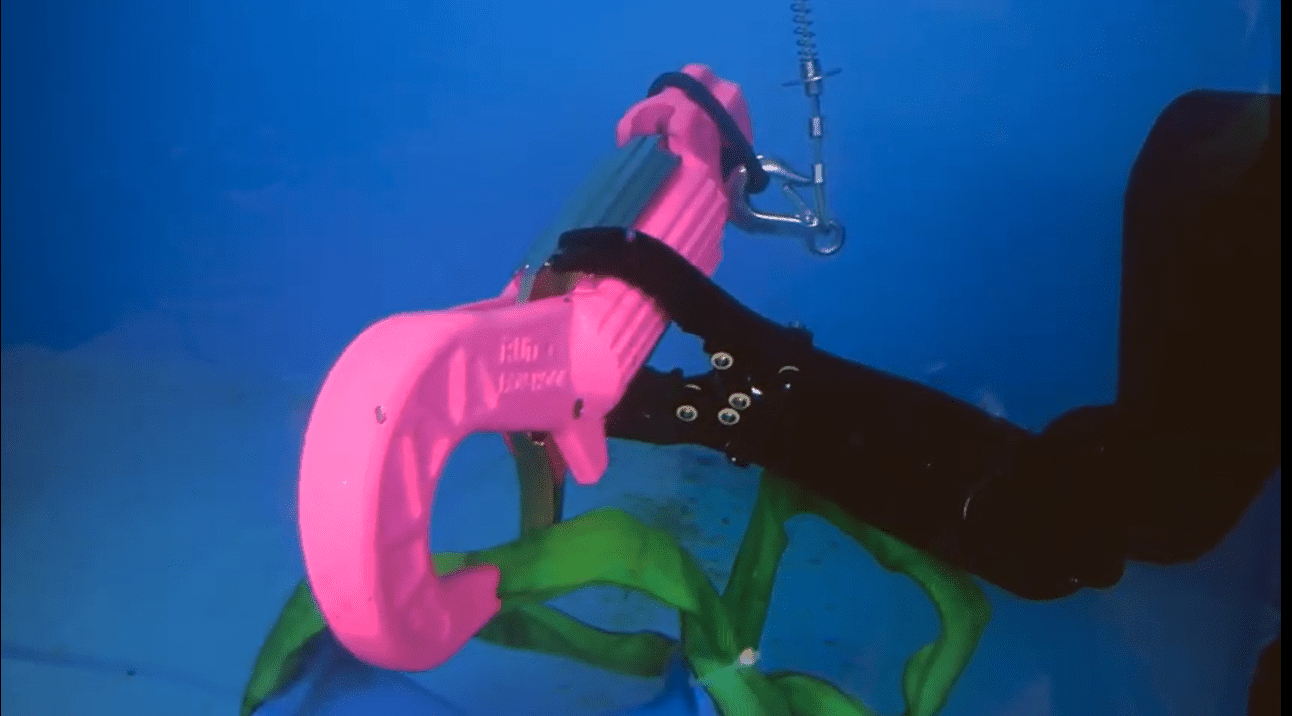
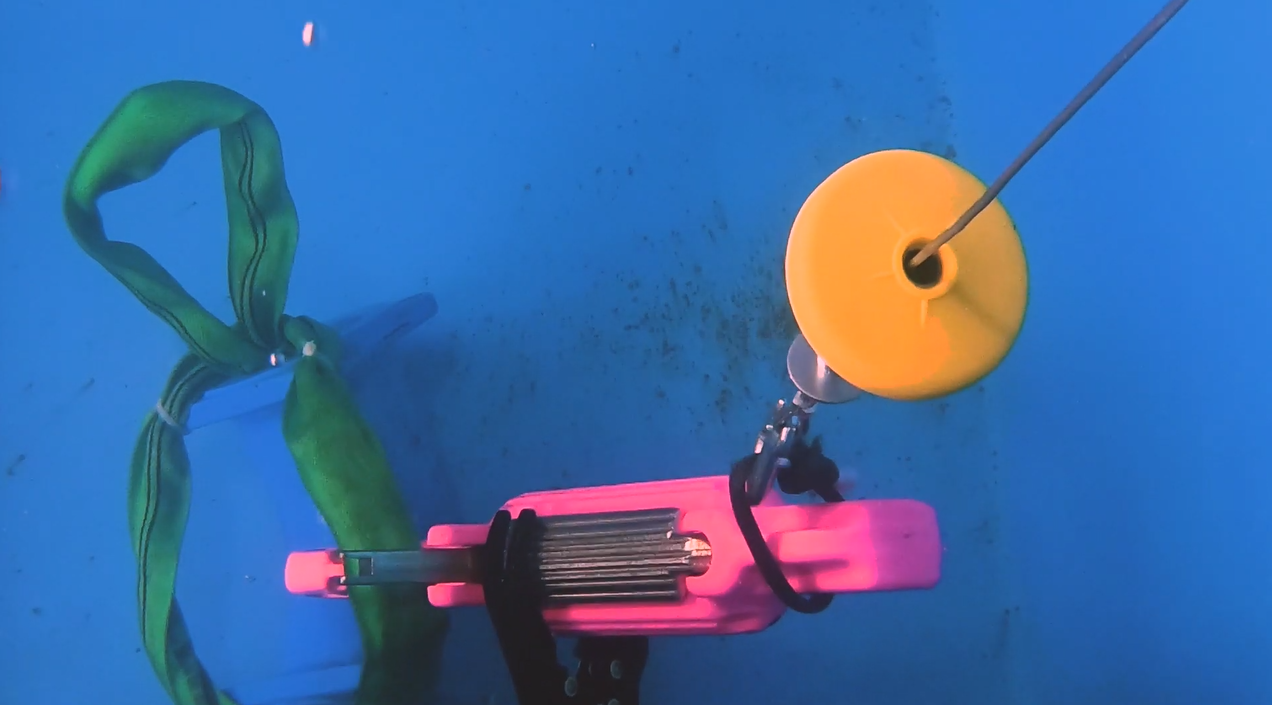
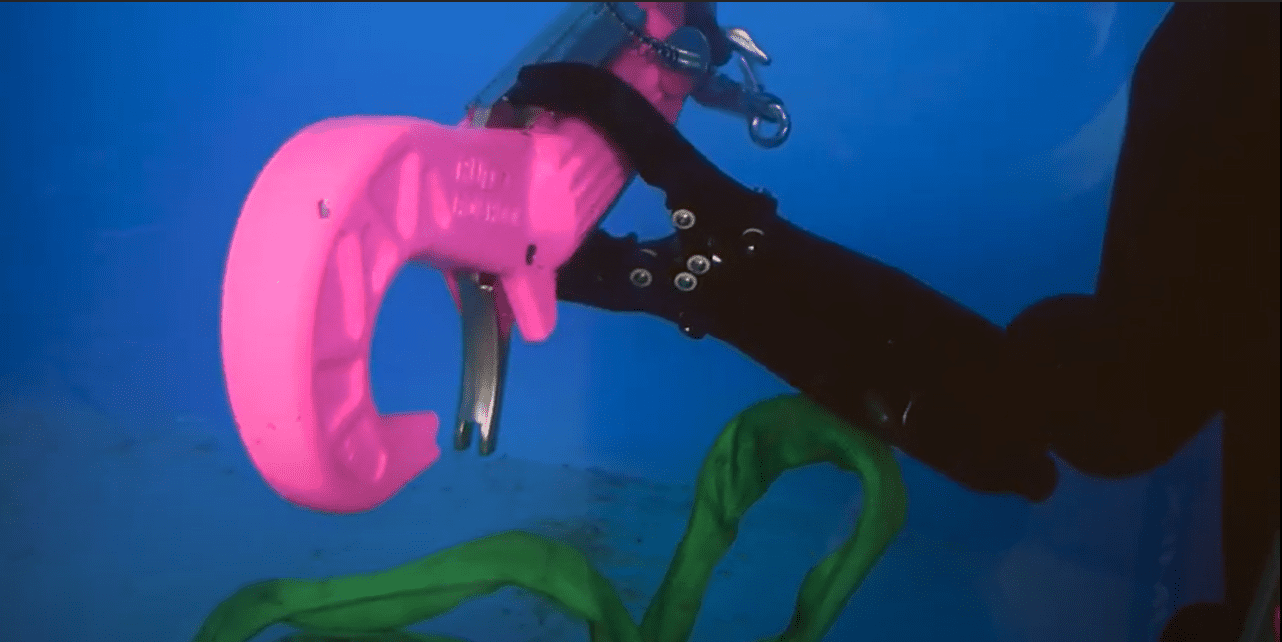
The Reach Bravo manipulator series has been designed with complex tasks in mind, allowing it to wield and operate ROV hooks in harsh, underwater conditions. The Reach Robotics R&D Team often test our manipulators in simulated real-world scenarios to verify their feasibility. The stills pictured here show a simulation run in our in-house test tank featuring a Bravo 7 wielding an ROV hook to recover ‘construction debris.’ See the full demonstration here.
Powerful Reach Bravo robotic arms can lift between 10-15kg at full reach, depending on the specific model. Bravo manipulators also feature high accuracy (0.1°) joint positioning and adjustable grab force for precise placement of ROV hooks and other O&M tools.
Paired with the intuitive Master Arm controller, the Bravo series requires minimal training for offshore operators and the all-electric form factor results in minimal downtime. The Reach Bravo has been proven to successfully integrate onto inspection class vehicles popular in Offshore Energy industries including the Saab Seaeye Falcon. With remote assistance available from Reach Robotics’ Technical Support Team based in the UK, USA and Australia, help is always on call to support operators in the field.


