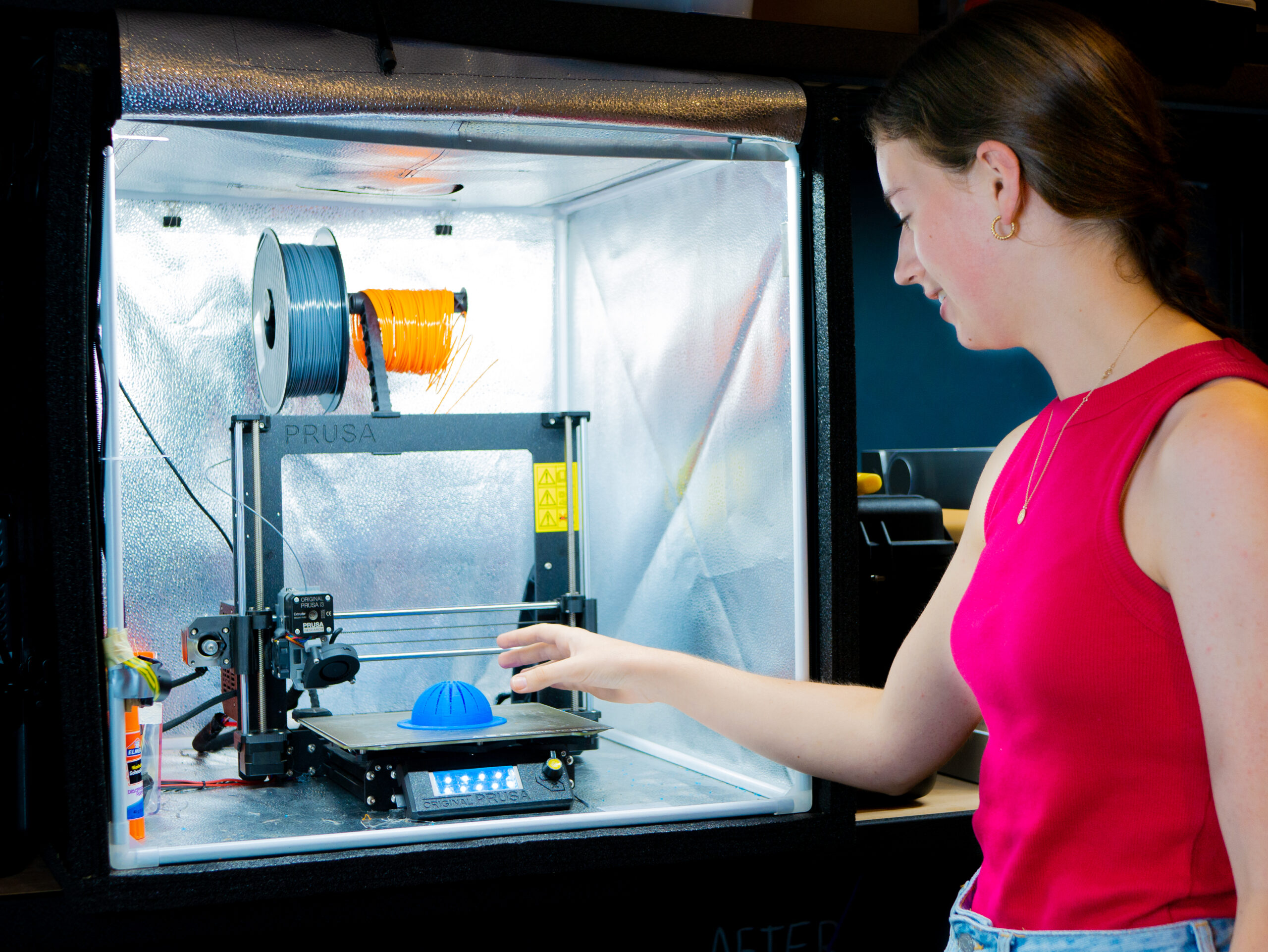
In recent weeks, Reach Robotics has welcomed a work experience candidate in our office – aspiring engineer, Matilda Hardy. Matilda is exploring different engineering pathways to pursue at university and gained valuable insight to Mechatronics, Electrical, Software and Mechanical Engineering by working amongst the diverse team of engineers in the lab.
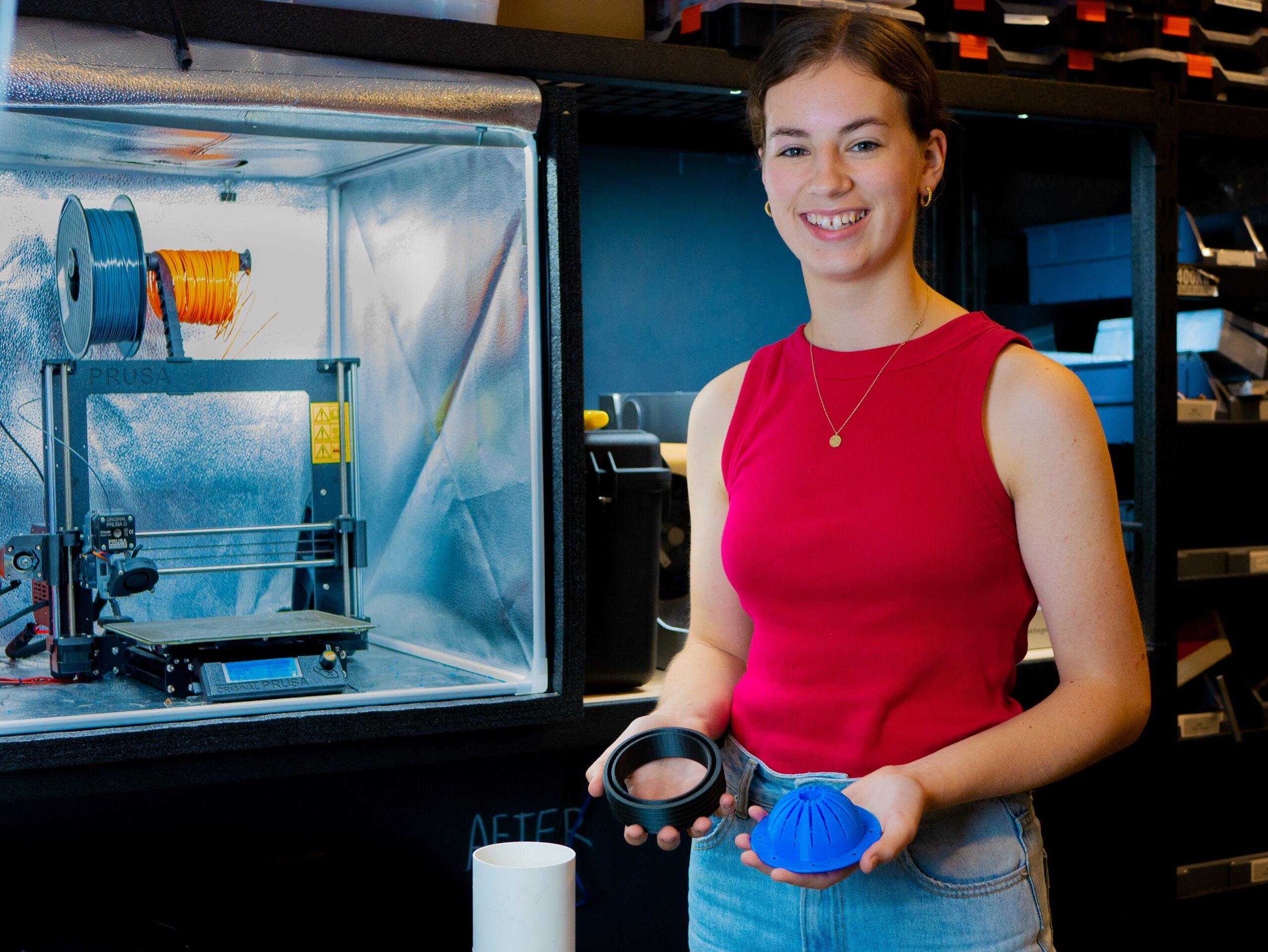
Over the duration of her time in the lab, she completed a self-driven project using our in-house facilities including a 3D printer to prototype an underwater sediment sampler, an ROV tool compatible with our robotic manipulators. Combining her interests for Marine Research and Engineering, Matilda designed a tube-like core sediment sampler that can be attached to a manipulator and submerged for inspection operations. The samples recovered can be examined for minerals and microbiomes to better understand what can live in different soil types and altitudes as well as how this has changed over time.
When asked what her biggest takeaways were from her work experience, Matilda expressed that engineering is “never a straight path, there’s always multiple ways to go about solving a problem and always a lot to learn.” She also enjoyed experiencing the autonomy and independence of working on her own project with the guidance of Reach Robotics engineers.
We’re inspired by Matilda’s passion and self-driven approach to her education and asked if she had any advice for young people, particularly women, who are interested in studying engineering in Australia. She encouraged people to focus on networking and research, approaching teachers and looking to industry relevant media like documentaries for inspiration.
At Reach Robotics, we’re proud to continue supporting the future of engineering in Australia through work experience opportunities for students. If you’re interested in interning with Reach Robotics or learning more about our past intern projects, visit our Careers page for information. To be the first to know when we open applications, follow us on linked in where we share regular updates.