Heriot Watt University Researchers Test NDT Solutions with Reach Bravo 7 Manipulator
Posted on February 08, 2022
Led by Prof. Yvan Petillot, a team of 4 researchers and engineers from Heriot-Watt University (HWU) in Edinburgh are working to find reliable, robotic solutions for inspection and maintenance of subsea structures.
Their specific focus lies in overcoming challenging and unpredictable factors common to underwater environments during surface cleaning, inspection and non-destructive testing (NDT) operations. Typical challenges include instability and movement of the ROV or manipulator due to ocean currents, causing adverse impact and resulting damage to the structure or tools involved, as well as inefficient inspections due to contact-loss with the surface.
To test and enable their work, the HWU team have been using Reach Roboticss’ Reach Bravo 7-function manipulator, affixed with a force/torque sensor at the wrist of the robotic arm. The feedback from this sensor has facilitated the implementation of a controller designed to maintain the consistency of desired force while tracking a contoured surface and minimising contact loss.
The controller combines the ROVs dynamic range of movement with the manipulator arms’ 6 degrees of freedom (DOF) to autonomously configure the optimum trajectory of the system to maintain the desired force when interacting with the surface. This feature will be hugely beneficial when conducting maintenance operations of offshore structures in a real-world or field environment.
Designed for inspection-class vehicles, the Reach Bravo 7’s dexterity and Force/Torque Sensor’s accurate data feedback make this powerful a manipulation, intervention and inspection tool for subsea operation. In their own words, the HWU researchers describe the Bravo 7 robotic manipulator as providing “smooth, agile and accurate movements in underwater scenarios,” helping them achieve their ambitions in the subsea intervention space.
Reach Robotics strives to continue supporting robotics research and the advancement of intervention capabilities in underwater landscapes. The ongoing developments by the HWU team will ultimately allow for greater success during subsea maintenance operations.
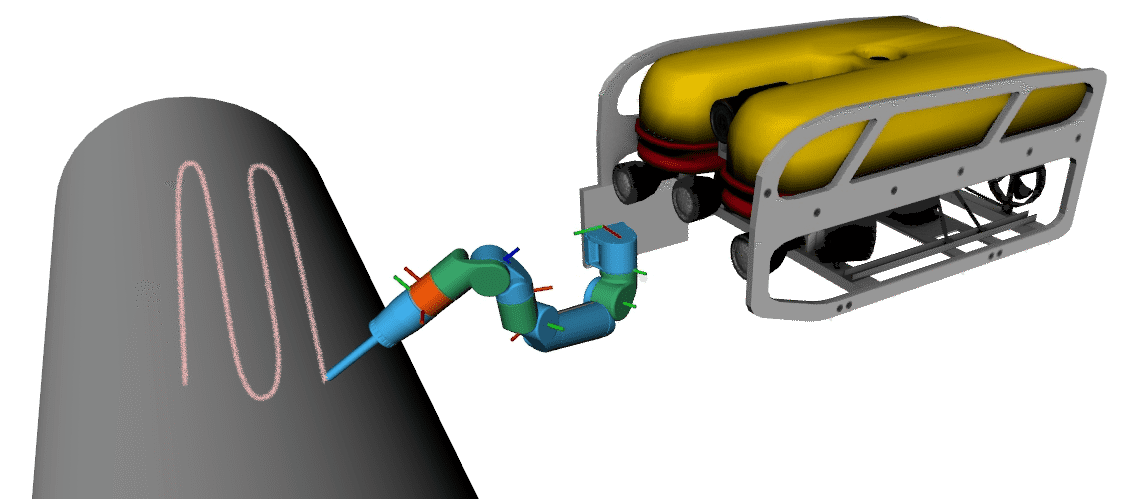
“Force tracking in UVM. A raster parametric trajectory is followed to cover a certain surface area of the agent we
plan to interact with, without prior knowledge and without vision of the surface structure.“

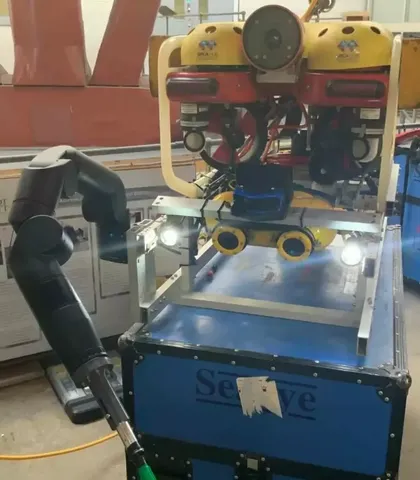
Reach Bravo Arm and Force/Torque Sensor being used in the HWU lab.
All imagery courtesy of HWU