Robotic Arm Control Software
An advanced Human Machine Interface (HMI) providing intuitive control between operator and manipulator system. Reach Control features include kinematic control and workspace definition to enable the execution of complex tasks in remote and hostile environments.
DO MORE WITH YOUR MANIPULATOR
Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI with advanced monitor and control functionality. There are two Reach Control software packages available to choose from – the Lite version covers all basic operator needs while Pro offers a comprehensive line up of features and benefits.
Compare our Reach Control packages below and don’t hesitate to contact us if you need any additional information about which software is right for your requirements.
REACH CONTROL SOFTWARE FEATURES
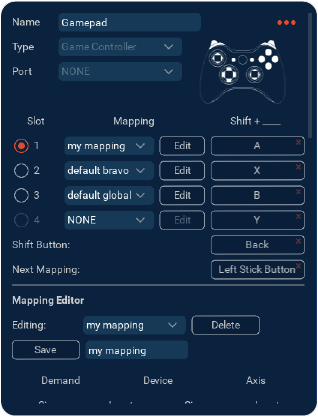
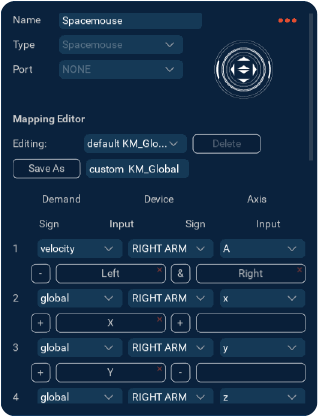
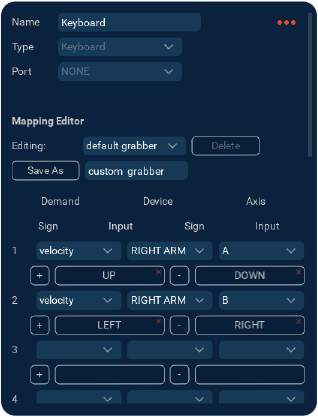
Customisable settings for your specific requirements
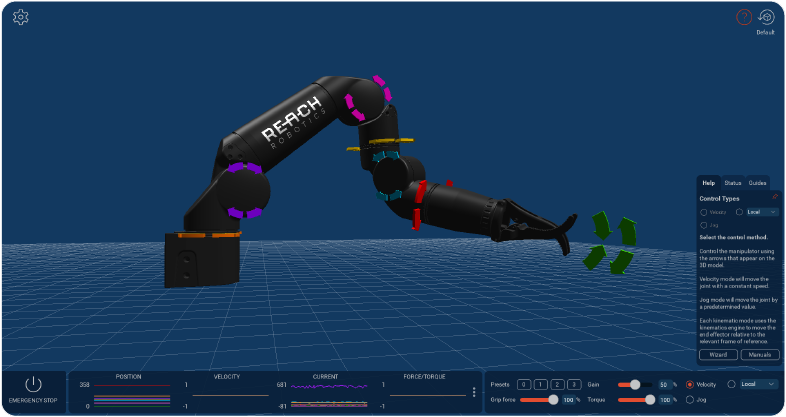
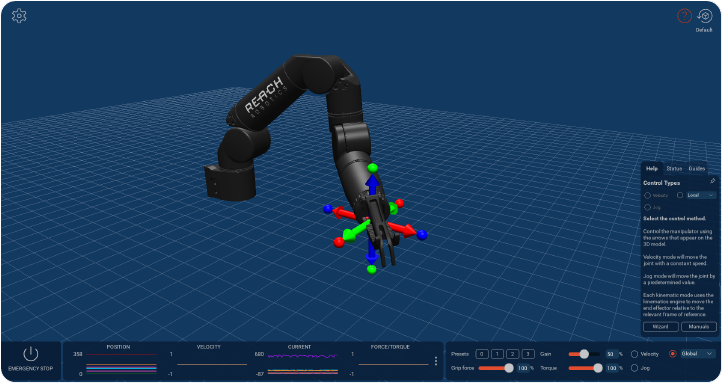
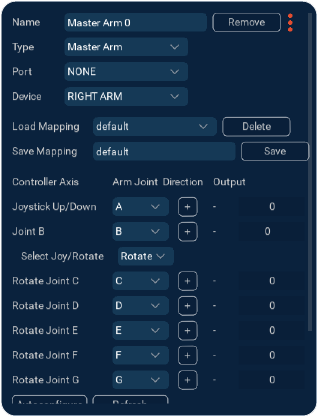
- Kinematic and Global movement control for task accuracy
- Collision avoidance with simple environmental obstacle setup
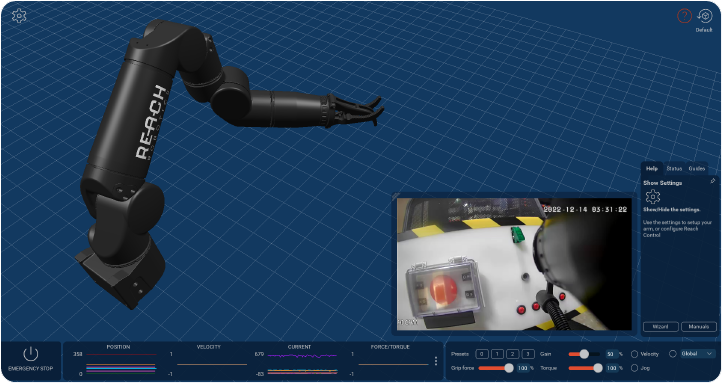
- Live video feedback with the Micro IP Camera widget
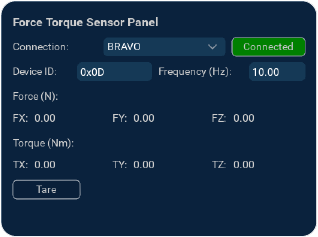
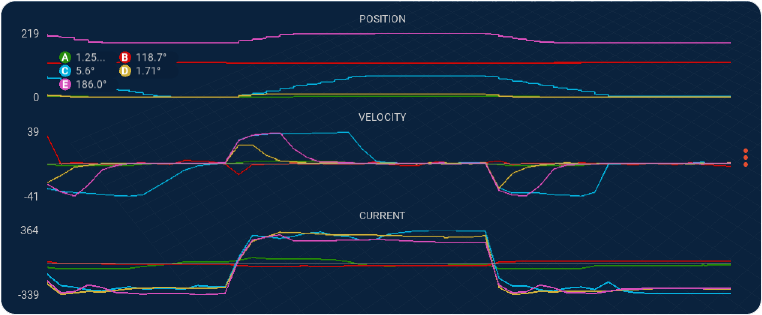
- Real-time accurate Position, Current and Velocity readings
- Define position presets for quick stow and deploy
- Customise speed, grip force and more for task-specific operations
- Compatible with Windows 10 OS and Linux Ubuntu 18.04 LTS or higher
AVAILABLE CONTROL SOFTWARE PACKAGES
Features |
Reach Control LiteRC-1000 |
Reach Control ProRC-2000 |
|---|---|---|
| Communication over TCP/IP, serial, or UDP | ||
| Diagnostics and status monitoring | ||
| Customisable limits of position, velocity and force | ||
| Basic Kinematics for Obstacle Avoidance | ||
| Workspace Obstacle Avoidance | ||
| Number of Obstacles | 1 | 8 |
| Advanced Kinematics Engine | ||
| Cartesian (XYZ) End-Effector Control | ||
| Eye-Ball Control (move arm with respect to tool/sensor orientation) | ||
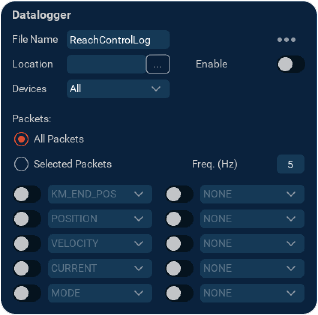
| Data Logging Tool | ||
| Custom Probe Configuration | ||
| End-Effector Tool Configuration | ||
| Position Presets | 2 | 4 |
INCLUDED IN ALL PURCHASES |
REQUEST A QUOTE |
|
|
"Compare our Reach Control packages and don't hesitate to contact
us if you need any additional information about which software is right for your requirements".
|
||