Advanced manipulator technology, versatile tooling options, and intuitive vision and control
systems - Reach Robotics products are effective and solutions-based for complex intervention
and inspection in any environment.
Menu
Advanced ROV Manipulators
Reach X
Adaptive remote intervention for critical forces
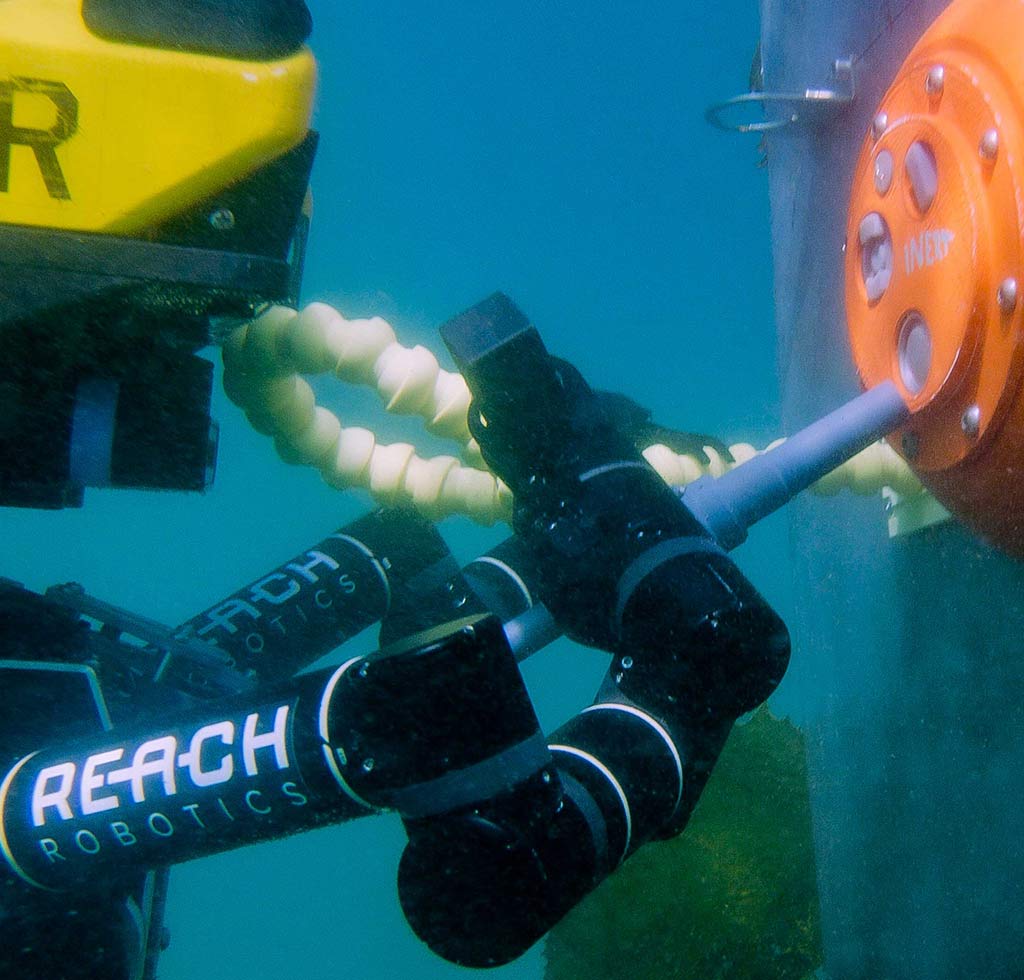
The Reach X manipulator series is designed for mission-critical remote intervention. With best-in-class performance, this versatile system enables operators to cut, grab, recover & disarm using portable ROVs.
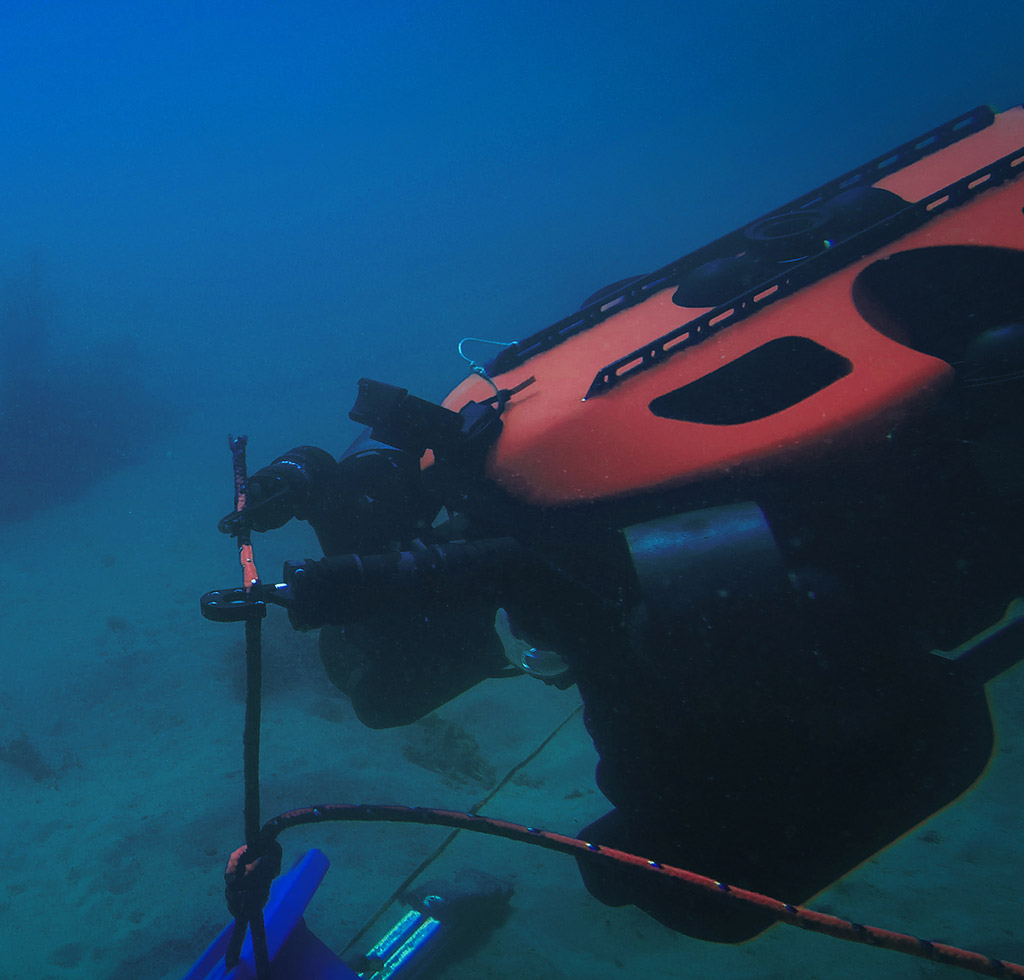
Our most rugged electric manipulator, the Reach Bravo is changing the way remote operations are conducted by inspection and intervention class vehicles. Ideal for inspection, maintenance and repair (IMR).
The world’s most lightweight, all-electric manipulator for portable ROVs, offering a complete solution for close inspection and intervention in confined or complex spaces.
The Reach X manipulatior series is designed for mission-critical remote intervention. With best-in-class performance, this versatile system enables operators to cut, grab, recover & disarm using portable ROVs.
Our most rugged electric manipulator, the Reach Bravo is changing the way remote operations are conducted by inspection and intervention class vehicles. Ideal for inspection, maintenance and repair (IMR).
The world’s most lightweight, all-electric manipulator for portable ROVs, offering a complete solution for close inspection and intervention in confined or complex spaces.
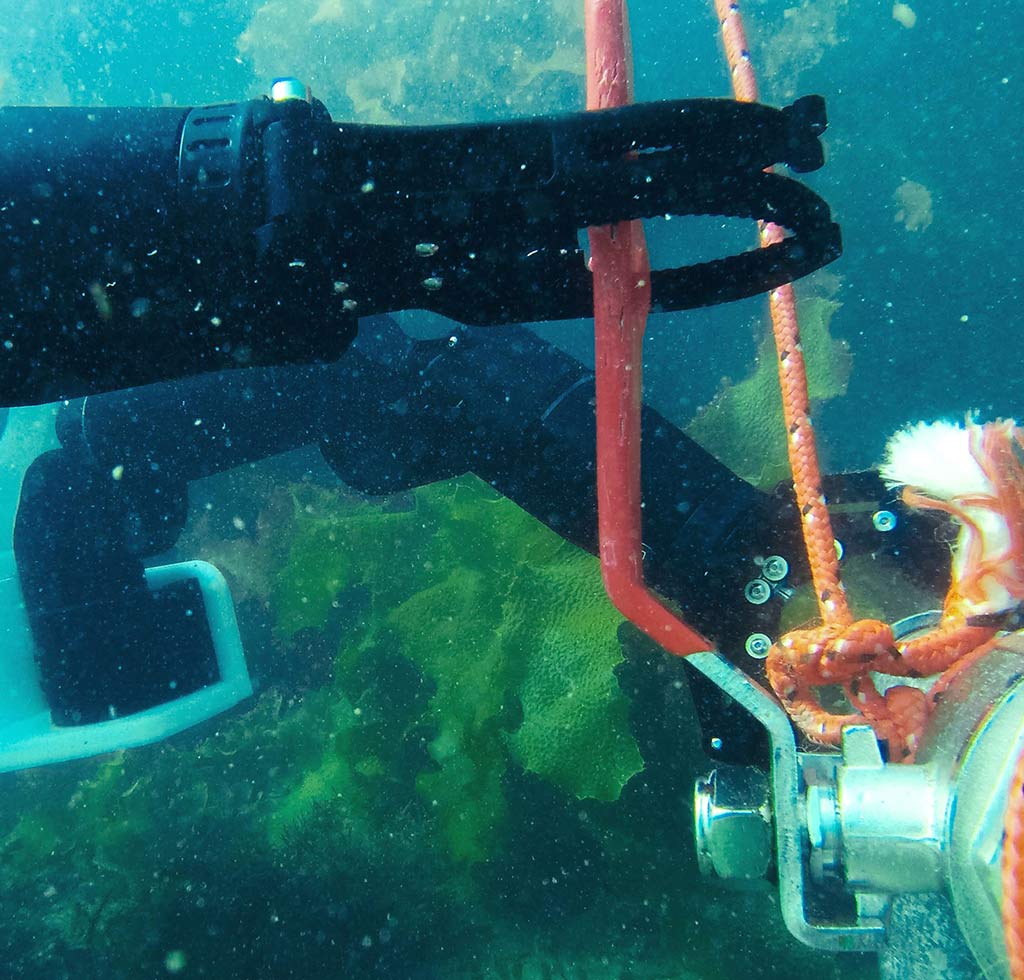
Featuring high clamping force and strong load rating, Grabbers in both Alpha and Bravo ranges are portable, lightweight and tough. These units are ideal for basic intervention tasks including Foreign Object Search and Retrieval (FOSAR) activities.
Adjustable grab force – pick up a sea urchin or cut a cable
High accuracy (0.1°) joint positioning
Active compliance enables safe lifting of unbalanced, heavy objects
With high accuracy (0.1°) joint positioning, our range of rotators and pan-tilt units are suitable for cameras, sonars and vectoring thrusters. These actuators feature active joint compliance which provides self-protection against impact and enables safe lifting of unbalanced, heavy objects.
Accurate position or velocity control
Active compliance enables safe lifting of unbalanced, heavy objects
See clearly in low light with our 2MP Micro IP Camera. Available in both Reach Alpha and Reach Bravo configurations, this fully submersible camera opens up capabilities in close visual inspection (CVI) and allows you to stay focussed on manipulator activity, independent of the vehicles onboard camera orientation.
With 1-1 joint matching and master-slave mimicry, Master Arm controllers are the most intuitive way to manoeuvre your manipulator. Improve task accuracy and efficiency today.
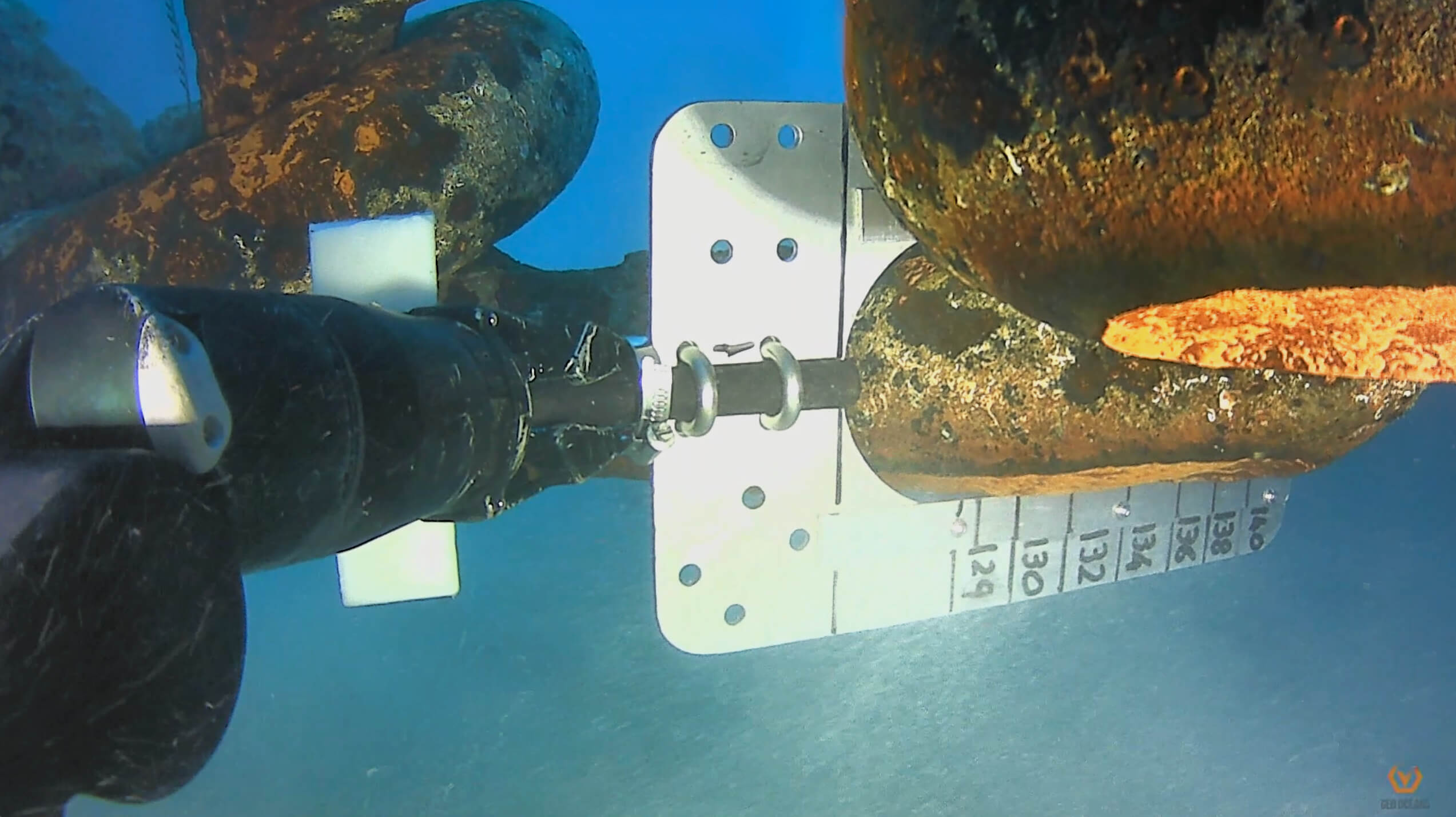
Precise placement of probes for crack and corrosion monitoring
Place and recover objects with unmatched dexterity and minimised workload
Command Pods are a pair of space mouse controllers comprising of left and right units. They are designed to attach to an ROV control tablet and allow full system control from one interface. The Command Pod configuration simplifies control of a dual-manipulator system as operators are able to intuitively control both arms, while still piloting the vehicle.
The joystick model allows for arms to be directed towards a target while the system automatically maps the arms configuration along that path.
Compatible with all Reach Robotics manipulators, the Master Arm controller is available in five and seven-function models to mimic your robotic arm. Achieve unparalleled precision and accuracy while undertaking complex tasks including:
Precise placement of probes for crack and corrosion monitoring.
Place and recover objects with unmatched dexterity and minimised workload.
Attach hooks and shackles consistently.
Reach confined areas unreachable with lower degree-of-freedom manipulators and traditional control methods.
Visit Offshore Technology Conference 2024 to see our advanced subsea manipulators in action. Meet our team & discover our robotic capabilities for defence and critical forces.