At Reach Robotics, our team of Software Engineers understand the challenges associated with integrating complex, existing systems, and the significance of having well-built development tools at hand. We regularly update our software tools for customers to integrate with our products, minimising setup time and allowing them to move on with their intended application.
The following is a breakdown of the various development tools which allow integration and prototyping of autonomous systems software.
Software Development Kit (SDK)
A Software Development Kit (SDK) is a collection of tools that allows programmers to easily use and interface with a product or resource. Its purpose is to assist integration and development. An SDK can include tools and applications to assist your development as well as programming interfaces.
At Reach Robotics, our SDK provides all the necessary tools to easily integrate and use our robotic manipulators. We include programming interfaces for commonly used languages (C/C++/Python/etc.).
We also provide tools, examples and support to assist development using our technology.
Robotic Middleware
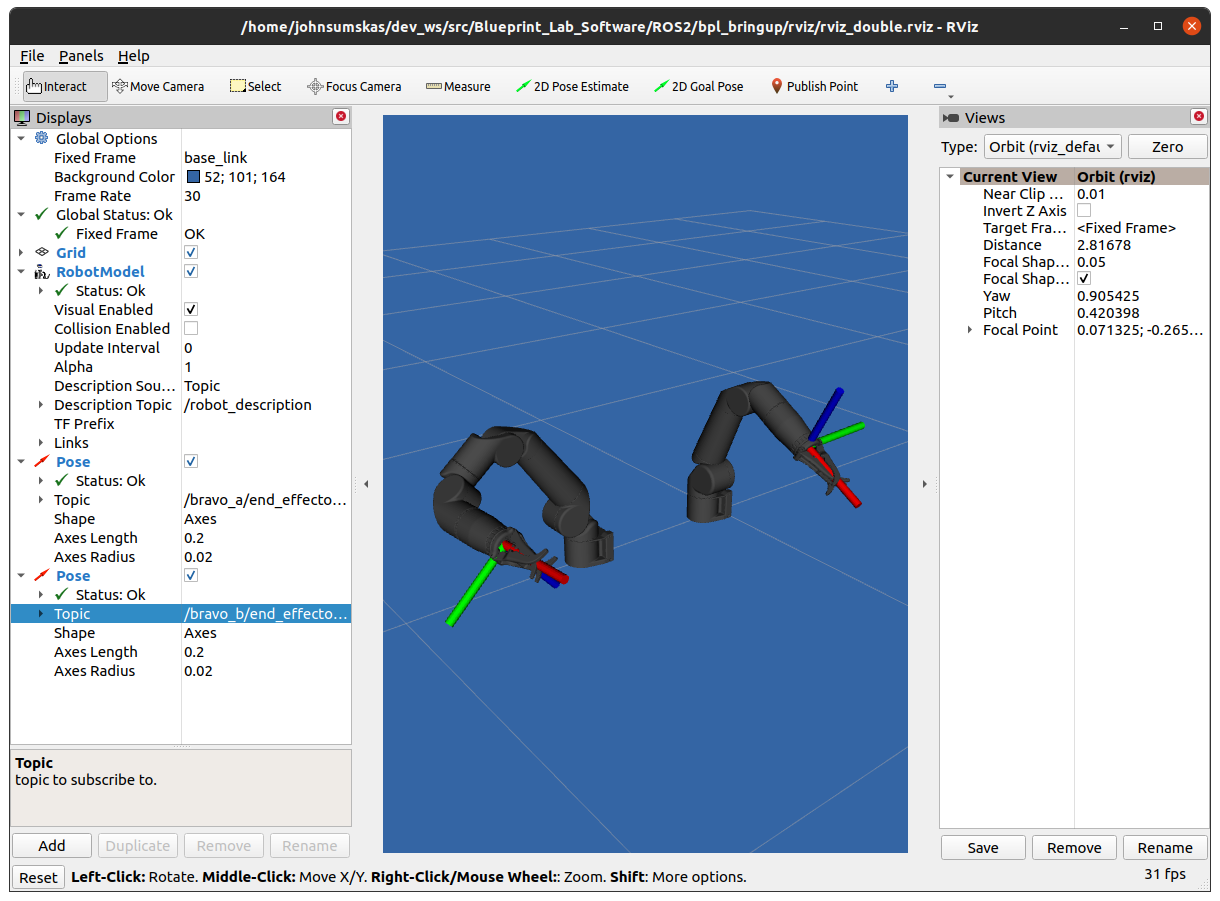
In complex robotic systems, robotic middleware is often used to manage the different systems that can be run. It allows for simplification of the software and can also provide very useful tools. This can include tools for introspection and visualisation to help diagnose errors.
Robotic middleware also provides standardisation for the different programs running in your robotic system. This in turn, allows you to take advantage of these standardised architectures and implement other externally developed programs to work with your system. An example of a popular Robotic Middleware is ROS.
The Reach Robotics SDK Provides ROS and ROS2 support, allowing customers to take full advantage of the robotic middleware described.
Simulation Tools
Simulation is a key robotic development tool. It allows you to safely test your system without the dangers of operating a physical robot or the need to have one readily available to you. You can also replicate and repeat scenarios that are not always available to you. Many simulation tools provide access to mock sensors, such as cameras and range sensors. These allow a user to replicate their specific robotic system as closely as possible.
Many simulation systems are tied closely to the use of robotic middleware as well. Simulations such as Gazebo integrate with ROS, with support for an extensive range of mock sensors.